Menu
Insight
PrismaX Base Layer: Infrastructure for Real-World AI Robotic
Everything that moves will eventually become autonomous. Robots come in many forms—every car today is already a robot. Now, we’re advancing toward building general-purpose robots in real-world robotics. At their core, physical AI and robotics share the same foundational challenges: where do you get the data, what is the model architecture, and how do we scale for autonomous robots?
The Future of Autonomous Robotics
PrismaX serves as a base layer for real-world AI robotics, addressing key challenges in teleoperation and robotics foundation models.
From Cars to General-Purpose Robots
By tackling these core challenges, we advance the frontiers of real-world robotics and bring the world towards an era where humans are empowered by machines to do more with less. We’re also establishing the new standard for fair use in the industry, one where the data that powers models generates revenue, which is returned to the communities that create the data. Robotics is quickly approaching an inflection point, and backbone providers stand to win big in autonomous robots.
PrismaX's Three Pillars: Data, Teleoperation, and Models
We focus on the three essential pillars of the robotics industry:
Data: Building protocols and mechanisms to validate and incentivize large-scale visual data, allowing robotics datasets to scale to the same heights as text data and enabling previously unattainable levels of accuracy and reliability in real-world robotics.
Teleoperation: Defining a uniform standard for teleoperation, providing turnkey access to operators, payments, and designs so robotics companies can focus on the things that make them different.
Models: Collaborating with AI teams to build robotics foundation models.
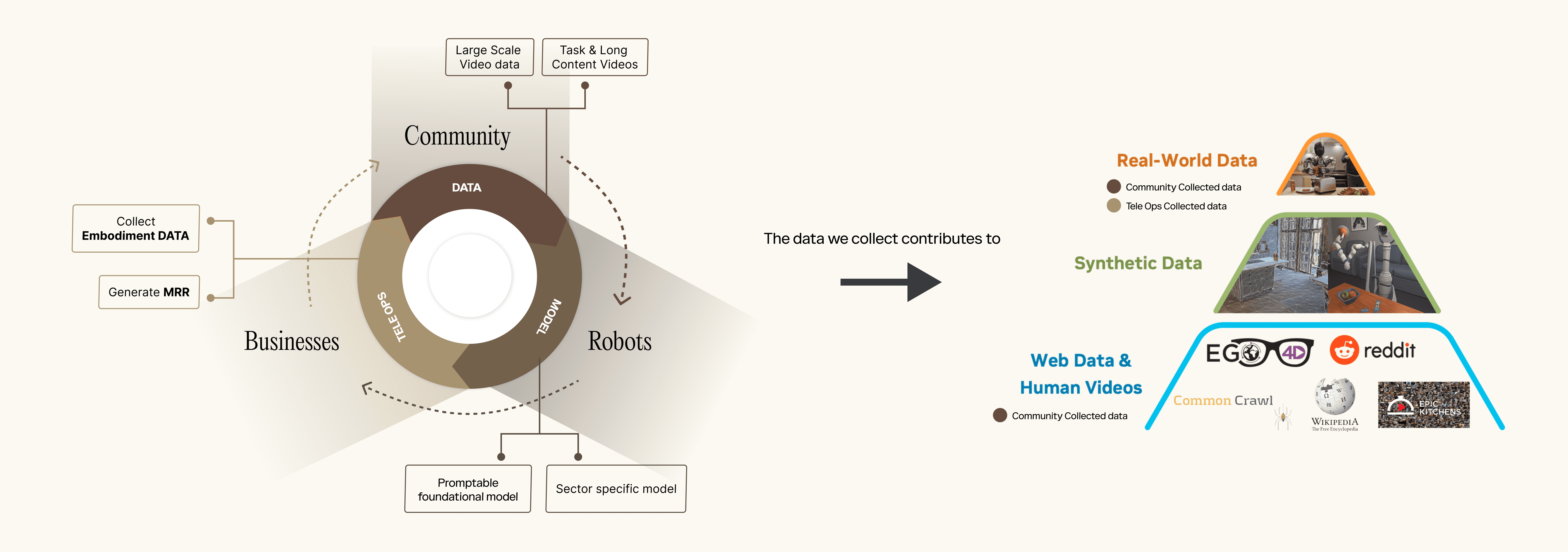
These three function as a data flywheel: large-scale data builds better foundation models, which boost teleoperation efficiency; teleoperation then fuels more real-world data collection, completing the loop for autonomous robots.
The Data-Model-Tele-op Flywheel
Visual data and teleoperation data complement each other during model training, the former providing diversity and scale during pretraining and the latter being critical during post-training and fine-tuning. Through collaboration with leading AI teams, we’re building models to power increasingly autonomous robots, amplifying the impact of our network by allowing operators to replace multiple physical workers, all while increasing the quality and quantity of the data we collect in AI robotics.
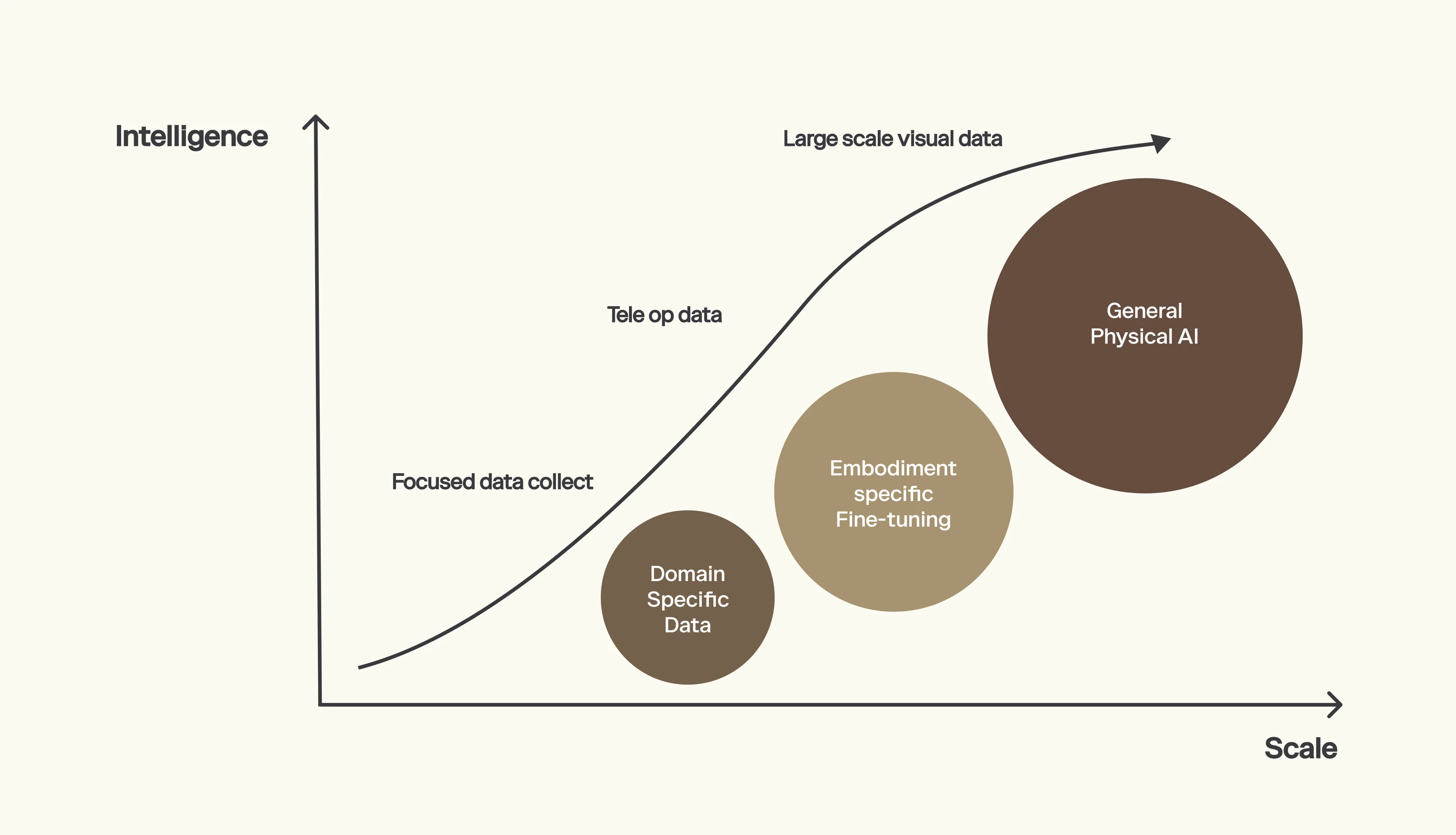
Scaling Data for Robotics AI
Data at scale drives progress, but real-world robotics is a data-deficient space.
Overcoming Data Deficiency in Robotics
The largest robotics datasets are only a few thousand hours of video, orders of magnitude smaller than the 15 trillion tokens used to train state-of-the-art language models. At PrismaX, we’re building the protocols and mechanisms to validate and incentivize large-scale visual data, allowing robotics datasets to scale to the same heights as text data and enabling previously unattainable levels of accuracy and reliability for autonomous robots.
Standardizing Teleoperation in Robotics
Teleoperation improves performance and generates high-quality data, but right now, every robotics company redoes the arduous work required to build a robust teleoperation stack.
Turnkey Solutions for Robotics Companies
For many companies, managing hundreds of teleoperators in an unfamiliar country is a daunting or impossible task. We’re defining a uniform standard for teleoperation, providing turnkey access to operators, payments, and designs so robotics companies can focus on the things that make them different in real-world robotics.
Building Foundation Models for Robots
Models bring everything together in AI robotics.
Complementing Visual and Tele-op Data
Through collaboration with leading AI teams, we’re building robotics foundation models to power increasingly autonomous robots, amplifying the impact of our network.
Here are the core challenges:
Data sourcing for the data flywheel.
Model architecture for robotics foundation models.
Scaling teleoperation for autonomous robots.
More to explore



Menu
Insight
PrismaX Base Layer: Infrastructure for Real-World AI Robotic
Everything that moves will eventually become autonomous. Robots come in many forms—every car today is already a robot. Now, we’re advancing toward building general-purpose robots in real-world robotics. At their core, physical AI and robotics share the same foundational challenges: where do you get the data, what is the model architecture, and how do we scale for autonomous robots?
The Future of Autonomous Robotics
PrismaX serves as a base layer for real-world AI robotics, addressing key challenges in teleoperation and robotics foundation models.
From Cars to General-Purpose Robots
By tackling these core challenges, we advance the frontiers of real-world robotics and bring the world towards an era where humans are empowered by machines to do more with less. We’re also establishing the new standard for fair use in the industry, one where the data that powers models generates revenue, which is returned to the communities that create the data. Robotics is quickly approaching an inflection point, and backbone providers stand to win big in autonomous robots.
PrismaX's Three Pillars: Data, Teleoperation, and Models
We focus on the three essential pillars of the robotics industry:
Data: Building protocols and mechanisms to validate and incentivize large-scale visual data, allowing robotics datasets to scale to the same heights as text data and enabling previously unattainable levels of accuracy and reliability in real-world robotics.
Teleoperation: Defining a uniform standard for teleoperation, providing turnkey access to operators, payments, and designs so robotics companies can focus on the things that make them different.
Models: Collaborating with AI teams to build robotics foundation models.
These three function as a data flywheel: large-scale data builds better foundation models, which boost teleoperation efficiency; teleoperation then fuels more real-world data collection, completing the loop for autonomous robots.
The Data-Model-Tele-op Flywheel
Visual data and teleoperation data complement each other during model training, the former providing diversity and scale during pretraining and the latter being critical during post-training and fine-tuning. Through collaboration with leading AI teams, we’re building models to power increasingly autonomous robots, amplifying the impact of our network by allowing operators to replace multiple physical workers, all while increasing the quality and quantity of the data we collect in AI robotics.
Scaling Data for Robotics AI
Data at scale drives progress, but real-world robotics is a data-deficient space.
Overcoming Data Deficiency in Robotics
The largest robotics datasets are only a few thousand hours of video, orders of magnitude smaller than the 15 trillion tokens used to train state-of-the-art language models. At PrismaX, we’re building the protocols and mechanisms to validate and incentivize large-scale visual data, allowing robotics datasets to scale to the same heights as text data and enabling previously unattainable levels of accuracy and reliability for autonomous robots.
Standardizing Teleoperation in Robotics
Teleoperation improves performance and generates high-quality data, but right now, every robotics company redoes the arduous work required to build a robust teleoperation stack.
Turnkey Solutions for Robotics Companies
For many companies, managing hundreds of teleoperators in an unfamiliar country is a daunting or impossible task. We’re defining a uniform standard for teleoperation, providing turnkey access to operators, payments, and designs so robotics companies can focus on the things that make them different in real-world robotics.
Building Foundation Models for Robots
Models bring everything together in AI robotics.
Complementing Visual and Tele-op Data
Through collaboration with leading AI teams, we’re building robotics foundation models to power increasingly autonomous robots, amplifying the impact of our network.
Here are the core challenges:
Data sourcing for the data flywheel.
Model architecture for robotics foundation models.
Scaling teleoperation for autonomous robots.
More to explore
Menu
Insight
PrismaX Base Layer: Infrastructure for Real-World AI Robotic
Everything that moves will eventually become autonomous. Robots come in many forms—every car today is already a robot. Now, we’re advancing toward building general-purpose robots in real-world robotics. At their core, physical AI and robotics share the same foundational challenges: where do you get the data, what is the model architecture, and how do we scale for autonomous robots?
The Future of Autonomous Robotics
PrismaX serves as a base layer for real-world AI robotics, addressing key challenges in teleoperation and robotics foundation models.
From Cars to General-Purpose Robots
By tackling these core challenges, we advance the frontiers of real-world robotics and bring the world towards an era where humans are empowered by machines to do more with less. We’re also establishing the new standard for fair use in the industry, one where the data that powers models generates revenue, which is returned to the communities that create the data. Robotics is quickly approaching an inflection point, and backbone providers stand to win big in autonomous robots.
PrismaX's Three Pillars: Data, Teleoperation, and Models
We focus on the three essential pillars of the robotics industry:
Data: Building protocols and mechanisms to validate and incentivize large-scale visual data, allowing robotics datasets to scale to the same heights as text data and enabling previously unattainable levels of accuracy and reliability in real-world robotics.
Teleoperation: Defining a uniform standard for teleoperation, providing turnkey access to operators, payments, and designs so robotics companies can focus on the things that make them different.
Models: Collaborating with AI teams to build robotics foundation models.
These three function as a data flywheel: large-scale data builds better foundation models, which boost teleoperation efficiency; teleoperation then fuels more real-world data collection, completing the loop for autonomous robots.
The Data-Model-Tele-op Flywheel
Visual data and teleoperation data complement each other during model training, the former providing diversity and scale during pretraining and the latter being critical during post-training and fine-tuning. Through collaboration with leading AI teams, we’re building models to power increasingly autonomous robots, amplifying the impact of our network by allowing operators to replace multiple physical workers, all while increasing the quality and quantity of the data we collect in AI robotics.
Scaling Data for Robotics AI
Data at scale drives progress, but real-world robotics is a data-deficient space.
Overcoming Data Deficiency in Robotics
The largest robotics datasets are only a few thousand hours of video, orders of magnitude smaller than the 15 trillion tokens used to train state-of-the-art language models. At PrismaX, we’re building the protocols and mechanisms to validate and incentivize large-scale visual data, allowing robotics datasets to scale to the same heights as text data and enabling previously unattainable levels of accuracy and reliability for autonomous robots.
Standardizing Teleoperation in Robotics
Teleoperation improves performance and generates high-quality data, but right now, every robotics company redoes the arduous work required to build a robust teleoperation stack.
Turnkey Solutions for Robotics Companies
For many companies, managing hundreds of teleoperators in an unfamiliar country is a daunting or impossible task. We’re defining a uniform standard for teleoperation, providing turnkey access to operators, payments, and designs so robotics companies can focus on the things that make them different in real-world robotics.
Building Foundation Models for Robots
Models bring everything together in AI robotics.
Complementing Visual and Tele-op Data
Through collaboration with leading AI teams, we’re building robotics foundation models to power increasingly autonomous robots, amplifying the impact of our network.
Here are the core challenges:
Data sourcing for the data flywheel.
Model architecture for robotics foundation models.
Scaling teleoperation for autonomous robots.